Tercer Milenio
En colaboración con ITA
Robots inspirados en termitas
Un equipo de investigadores usa la cooperación descentralizada de los insectos sociales para diseñar autómatas capaces de construir estructuras complejas de forma autónoma y no jerárquica.
A diferencia de las catedrales humanas, las termitas levantan sus termiteros sin necesidad de un plano general de la obra ni una jerarquía en la construcción. Y alguna de las torres de sus nidos son 500 veces más grandes que los insectos que las levantan. Inspirados en su inteligencia colectiva, unos ingenieros estadounidenses han diseñado robots capaces de construir torres, pirámides y castillos de forma descentralizada y autónoma.
Las termitas y otros insectos sociales, como abejas, avispas y hormigas, colaboran siguiendo su propia versión del piensa globalmente, actúa localmente. Son capaces de operar de forma descentralizada y reaccionando a cambios en su entorno más inmediato para construir sus nidos. Entre las primeras se han encontrado algunos termiteros catedrales con una ocupación de 1.000 m3. Es lo que el entomólogo francés Pierre-Paul Grassé llamó estigmergia, una forma de colaboración basada en unas pocas reglas implícitas (que pueden ser señales químicas como las feromonas, cambios en la temperatura o pequeñas alteraciones en el medio físico).
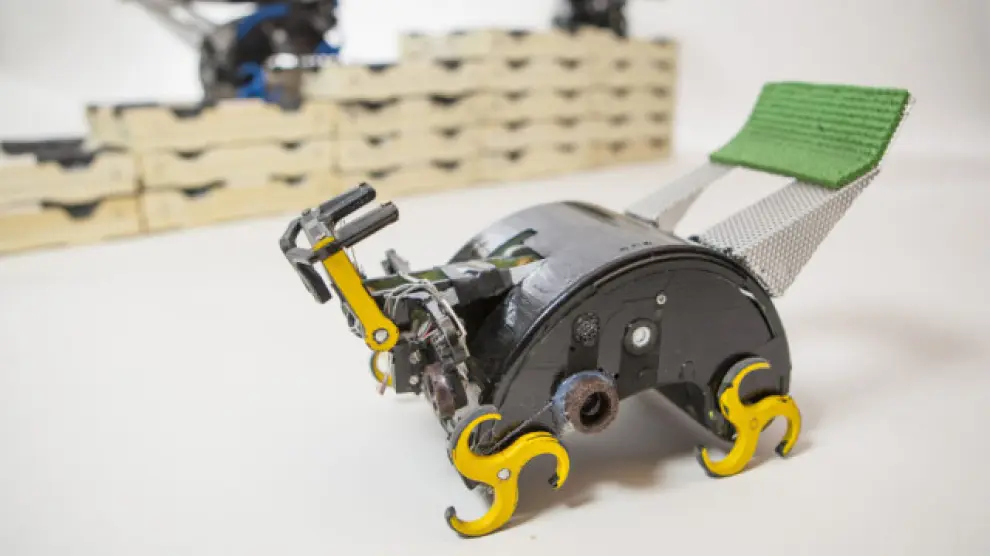
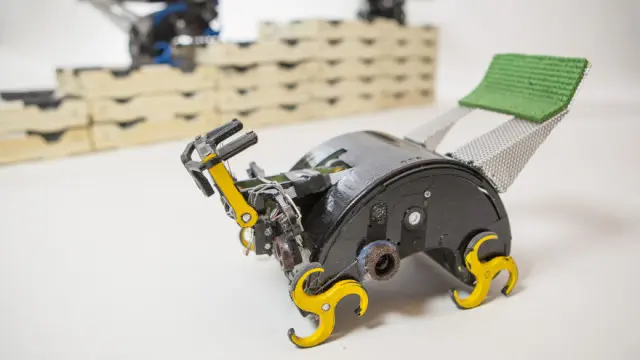
Siguiendo ese modelo de acción colectiva descentralizada, investigadores de dos institutos de la Universidad de Harvard han creado sus robots TERMES. Equipados con una serie de sensores para detectar su entorno o la presencia de otros robots, los ingenieros les grabaron la imagen final de la estructura que deseaban y una serie de reglas básicas de comportamiento: coger un ladrillo, detectar el hueco más próximo, escalar de uno en uno o detenerse ante la cercanía de otro robot y poco más. Mediante una serie de algoritmos, ellos solos pudieron levantar varias estructuras estables y sin que aquello degenerara en un atasco de robots.
