Tercer Milenio
En colaboración con ITA
¿Por qué lo blando se resiste a los robots?
Productividad y competitividad son aspectos fuertemente asociados con la automatización de los procesos industriales. Sin embargo, hay determinadas tareas que por su complejidad se resisten todavía a la automatización. Una de ellas es la manipulación mediante robots de objetos blandos o deformables. Este es el problema que abordan los investigadores de la Universidad de Zaragoza que participan en el proyecto europeo Commandia del Programa Interreg Sudoe.
Muchas industrias ven amenazado su futuro por la competencia de economías emergentes que tienen la ventaja competitiva de la mano de obra barata. La solución pasa por el aumento en la productividad de los procesos industriales. Algunos de ellos requieren el manejo de productos deformables, como alimentos, ropa, juguetes o artículos de piel. Sin embargo, la automatización de la manipulación y el procesamiento de estos productos es un desafío tecnológico debido a su variabilidad y a la necesidad de controlar con precisión su forma.
Actualmente no hay sistemas robóticos comerciales que ofrezcan una solución fiable y flexible para este tipo de procesos. Por este motivo, la mayoría de las tareas industriales que precisan el control de la forma de objetos deformables se realizan manualmente por operadores humanos, que ensamblan por ejemplo las piezas de piel de un zapato, o bien por sistemas muy específicos que no pueden usarse en otras aplicaciones, como mesas vibratorias para detectar fruta estropeada.
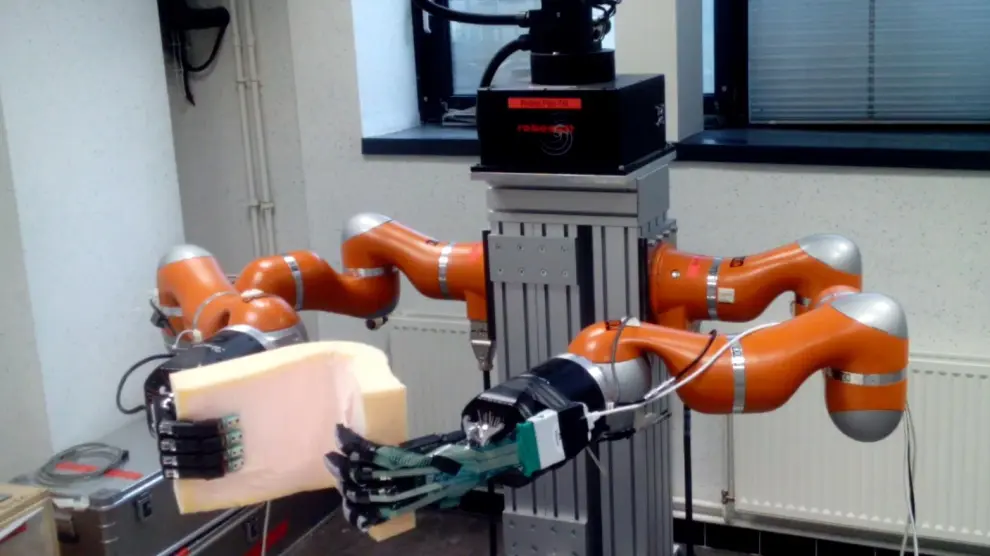
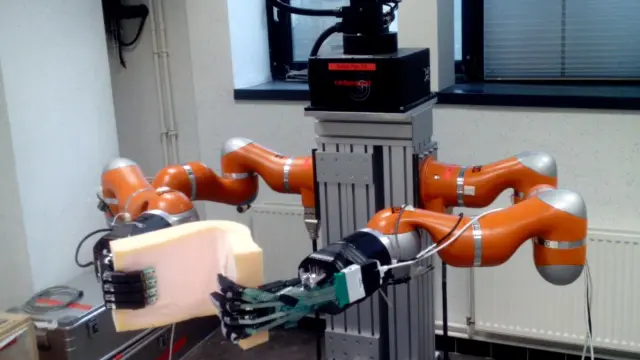
El proyecto Commandia, en el que participan Gonzalo López, Rosario Aragüés y Carlos Sagüés, del Instituto de Investigación de Ingeniería de Aragón (I3A), plantea la definición, el diseño y la implementación de funcionalidades integradas en plataformas robóticas que amplíen las capacidades de los sistemas actuales para la manipulación de objetos deformables en el contexto de la producción industrial. La solución propuesta requiere el desarrollo tecnológico de aspectos de percepción y control multimodal del robot manipulador, así como la coordinación de múltiples robots para la colaboración en tareas más complejas. Finalmente, se prevé la validación y transferencia de los resultados del proyecto en aplicaciones de sectores industriales como la fabricación de calzado o el procesamiento de alimentos.
Una persona distingue rápidamente entre un tomate maduro o verde, pero un robot acabará fácilmente con el tomate despanzurrado entre sus articulaciones. Más difícil aún es para él atar los cordones, ya que se requiere además la coordinación y sincronización de dos manos robóticas.
Aún falta mucho para que podamos ver en las tiendas algo parecido a aquel famoso Terminator que interpretó en el cine Arnold Schwarzenegger.
La complejidad de las tareas abordadas hace que en la actualidad sean los operadores humanos los que manipulen directamente los objetos deformables para controlar su forma durante la producción. En muchos casos, estas tareas manuales pueden producir dolencias o lesiones para los trabajadores. Por ejemplo, suelen ser perjudiciales los movimientos repetitivos o no ergonómicos para las articulaciones o también la manipulación de objetos muy pesados que puede causar fácilmente lesiones de espalda. Algunas actividades manuales se producen en entornos incómodos, como procesar alimentos en ambientes refrigerados y bajo olores desagradables. También puede haber riesgos directos para la salud cuando se manipulan productos tóxicos como colas o pinturas. La realización de algunas de estas tareas por sistemas robóticos tal y como se pretende en el proyecto Commandia será un factor importante para mejorar la competitividad de las industrias afectadas y también las condiciones de trabajo de los operarios.
Con la colaboración de la Unidad de Cultura Científica de la Universidad de Zaragoza